Finger Suit
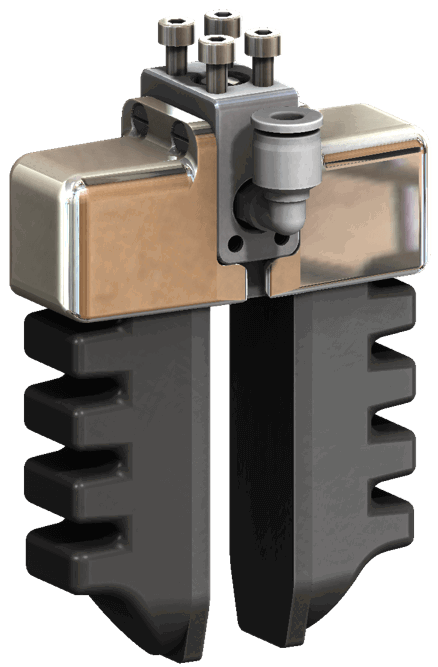
Rochu Finger Module FM-V1
Assembly module: Compact two-fingers module Features: two fingers combination, compact structure. Finger spacing and mounting Angle are unadjustable, be good at clamping small, light and thin object. Installation: can be screwed on three sides (optional). Air intake: Air intake on three sides (optional). Additional Sensor module is possible
Learn More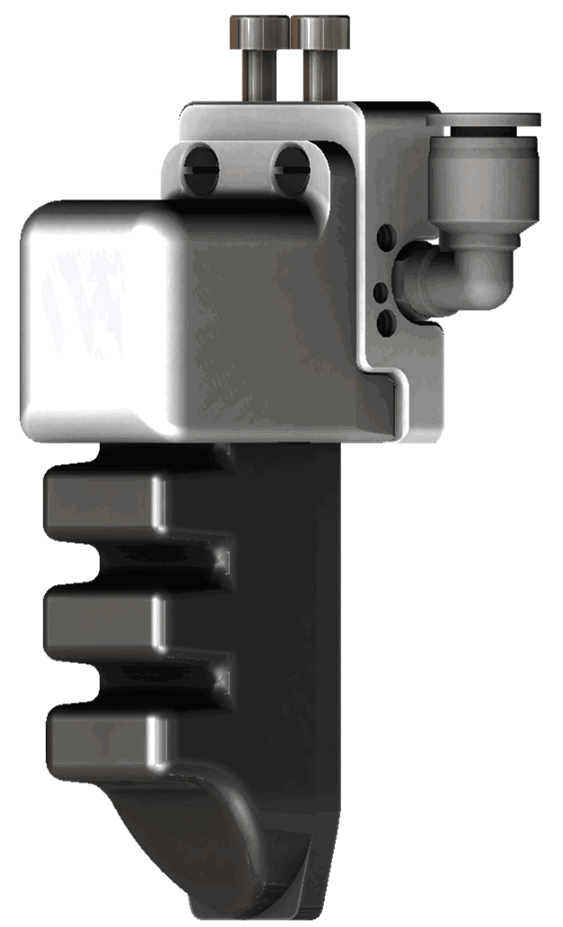
Rochu Finger Module FM-V2
V2 Assembly module--- Single-finger Module Features : single finger module, compatible with Slide mounting plate [SMP] (page.50), adjustable spacing and Angle. Installation: can be screwed on four sides (optional). Air intake: Air intake on three sides (optional). Additional Sensor module is possible
Learn More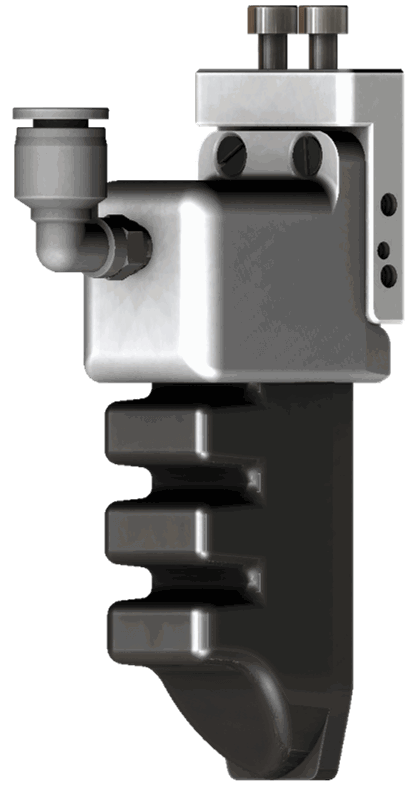
Rochu Finger Module FM-V3
V3 Assembly module--- Single-finger Module Features: single finger module, compatible with Slide mounting plate [SMP] (page.50), adjustable spacing and Angle. Installation: can be screwed on three sides (optional). Air intake: Air intake on one side (back of finger). Additional Sensor module is possible.
Learn More
Rochu Finger Module FM-V4
The V4 style finger module air pipe is installed on the side. The advantage is that only need one air pipe to drive multiple fingers when multiple fingers are installed together. It is mainly used in the application with diameter over 50mm, weight over 200g, and more than two fingers working at the same time.The air pipe is simple and convenient, saving space, reducing space interference, and suitable for compact space scene.
Learn More
Rochu Finger Module FM-V5
The air pipe of V5 style finger module is installed on the back, and each finger module needs independent air pipe. V5 style finger module is thinner and lighter. The space is only 8mm when placed opposite, suitable for grabbing small and light products
Learn More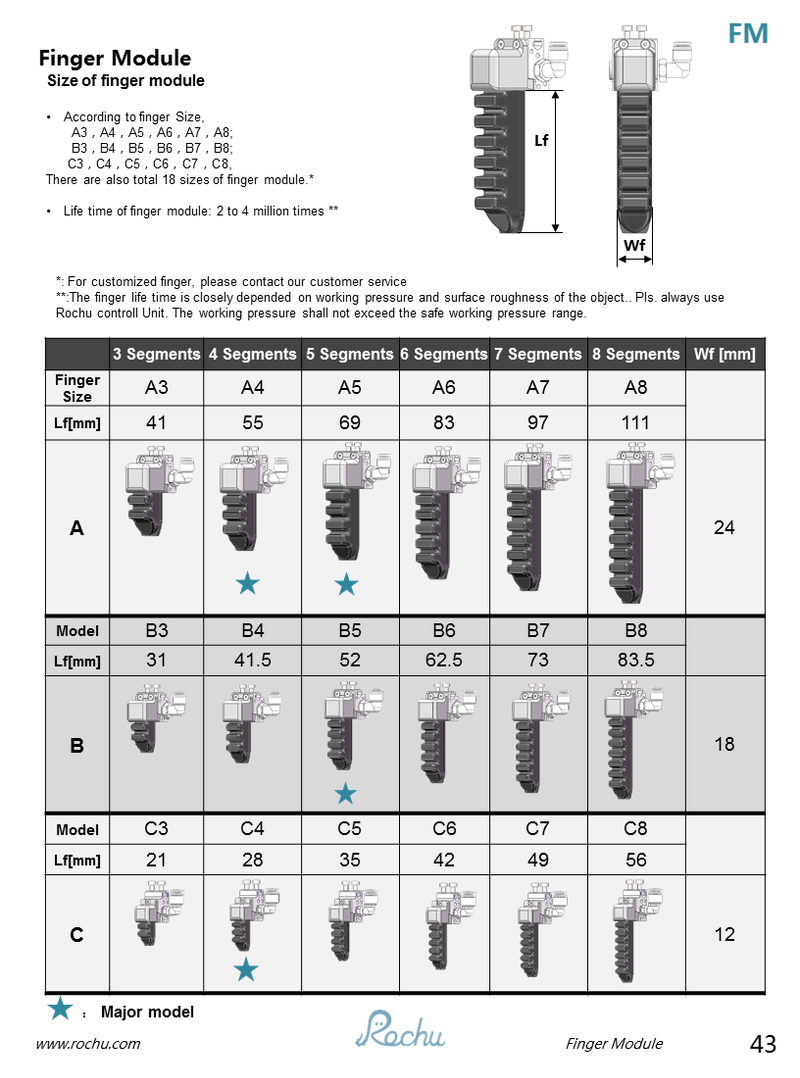
Rochu Finger Module
Because the spliced finger module is very expansibility, so fingers can be combined into various kinds of gripper. Fingers have four series: A, B, C,beak. And control unit is used for control gripper open and close.
Learn More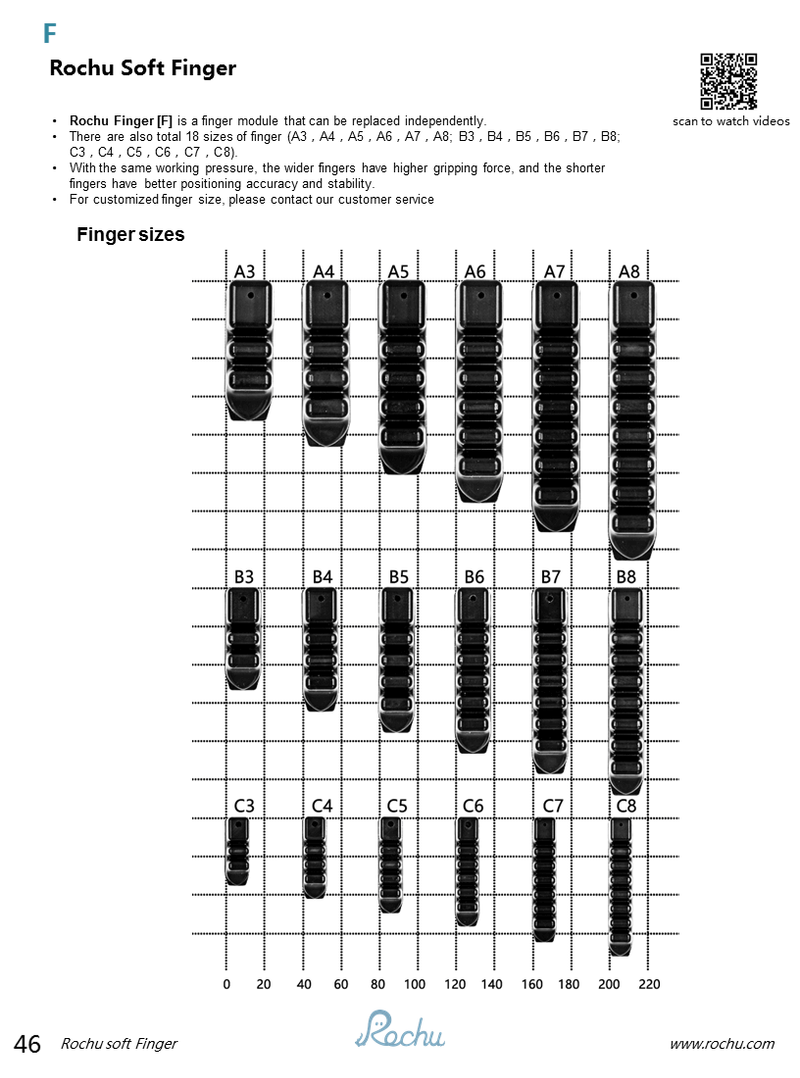
Rochu Finger
Rochu Finger [F] is a finger module that can be replaced independently. The bottom pattern and head shape of the finger can be customized according to the working conditions to achieve a more ideal grabbing effect.
Learn More