Was ist das Arbeitsprinzip von Roboter-Greifern?
Rochu Soft Robot Greifer ist ein pneumatischer Antriebsgreifer. Durch Überdruck oder Vakuumluftstrom öffnet oder greift der weiche Greifer.
Durch Einstellen des Luftdrucks zur Steuerung der Greifkraft (weicher Finger) oder des Öffnungsraums (weicher Schnabel).
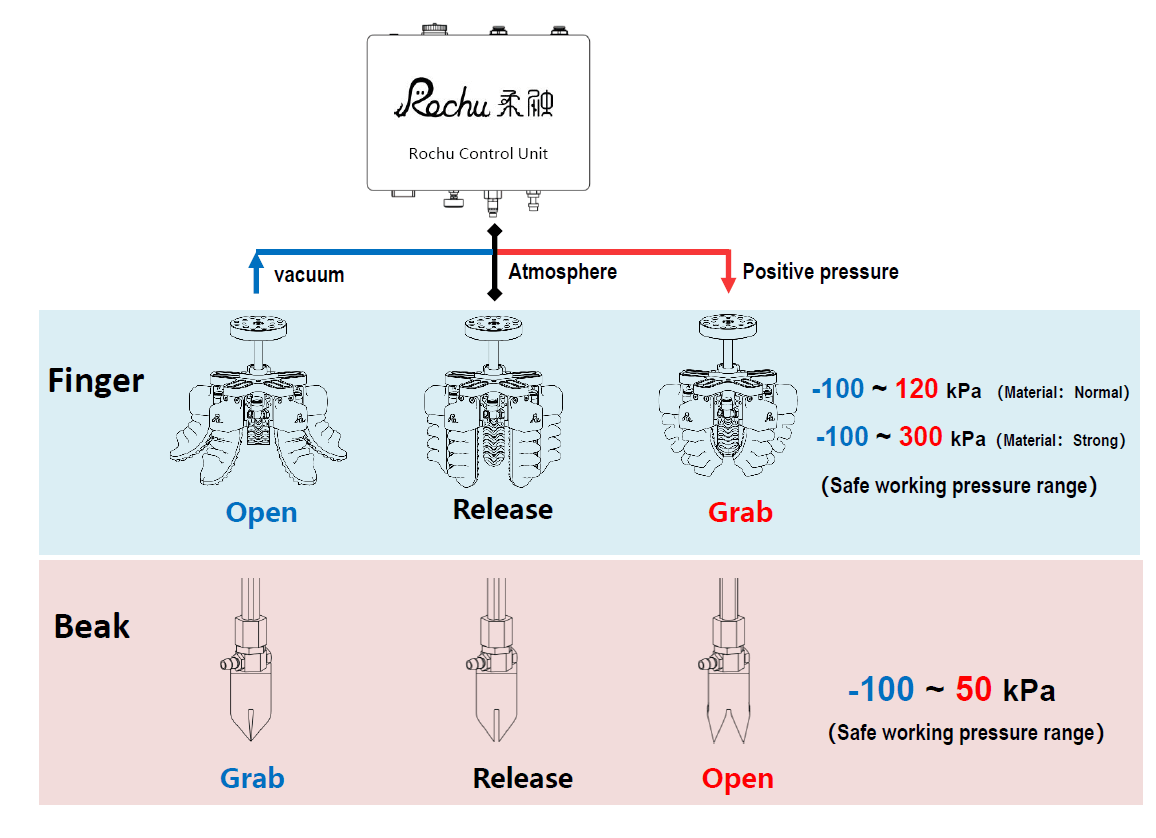
Der Arbeitsdruck muss in einem sicheren Bereich gehalten werden. Eine Überlastung kann zu irreversiblen Schäden am Finger führen. Es wird empfohlen, unsere "Rochu-Steuereinheit" zu verwenden, um die Lebensdauer des weichen Fingers und des Schnabels sicherzustellen.